神十四乘組完成第三次太空出艙 航天員太空艙外建天橋

香港文匯報訊(記者 劉凝哲 北京報道)神舟十四號航天員乘組17日完成中國太空站「T」字基本構型組裝完成後的首次太空出艙活動,這也是中國航天員乘組首次在一次飛行任務中進行三次太空出艙活動。中國載人航天工程宣布,11月17日16時50分,經過約5.5小時的出艙活動,神舟十四號航天員陳冬、劉洋、蔡旭哲密切協同,首次檢驗了航天員與組合機械臂協同工作的能力,進一步驗證了問天實驗艙氣閘艙和出艙活動相關支持設備的功能性能,圓滿完成出艙活動全部既定任務。
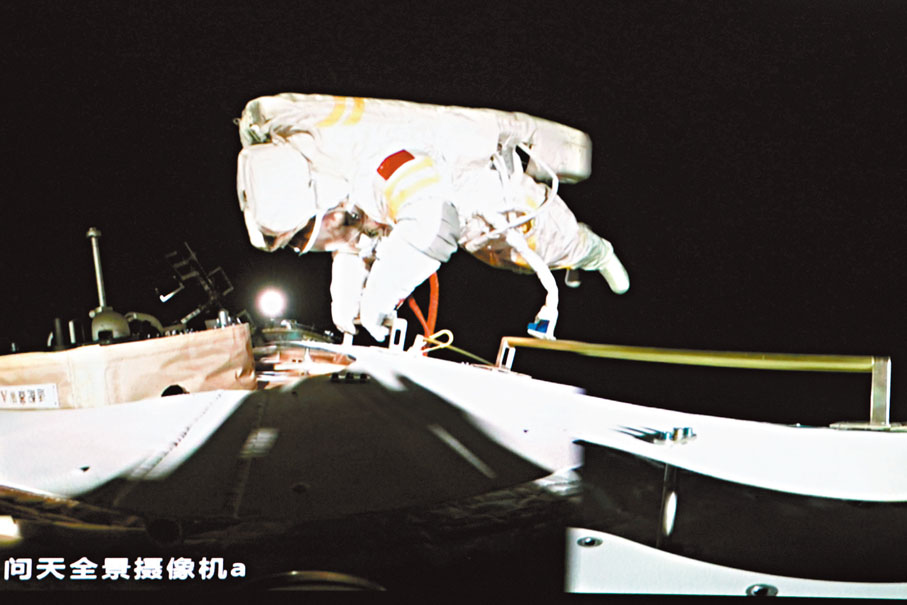
神舟十四號乘組17日進行第三次出艙活動。11時16分,問天艙氣閘艙出艙艙門成功開啟,身着「飛天」艙外航天服的航天員陳冬已出艙,蔡旭哲準備出艙,航天員劉洋在核心艙內配合支持。13時10分,航天員陳冬、蔡旭哲已完成出艙後各項準備,正在進行艙間連接裝置安裝作業。
原本預計6.5小時完成的太空出艙,提前1小時順利完成。16時50分,航天員陳冬、蔡旭哲已安全返回太空站問天實驗艙。出艙活動期間,他們首先完成了天和核心艙與問天實驗艙艙間連接裝置、天和核心艙與夢天實驗艙艙間連接裝置安裝,搭建起一座三艙間艙外行走的「天橋」,航天員蔡旭哲通過「天橋」實現了首次跨艙段艙外行走。
艙間連接裝置 助跨艙在軌維修作業
據新華社報道,航天科技集團五院總體設計部空間站系統總體副主任設計師李學東介紹,中國太空站「T」字構型特殊而複雜,要順利完成從一個艙段的外壁轉移至另一個艙段等多項艙外任務,對於身着厚重航天服的航天員來說無疑充滿挑戰。為了讓航天員自在「穿梭」於艙段間完成各項艙外任務,搭建一條艙間轉移路徑成為首選。
為此,航天科技集團五院艙外維修工具研製團隊特別為太空站設計了靈活而安全的艙間連接裝置,它是目前太空站上行艙外工具中長度最大,且可以跨艙開展空間在軌維修作業的關鍵設備。
據介紹,問天實驗艙艙間連接裝置長度約為3.2米,重約16公斤;夢天實驗艙艙間連接裝置長度約為2.6米,重約15公斤。航天員將其一端與實驗艙連接裝置的基座連接,另一端與天和核心艙的環形扶手連接,安裝完成後,航天員可實現從實驗艙到天和核心艙的爬行,不再需要機械臂臨時搭橋。
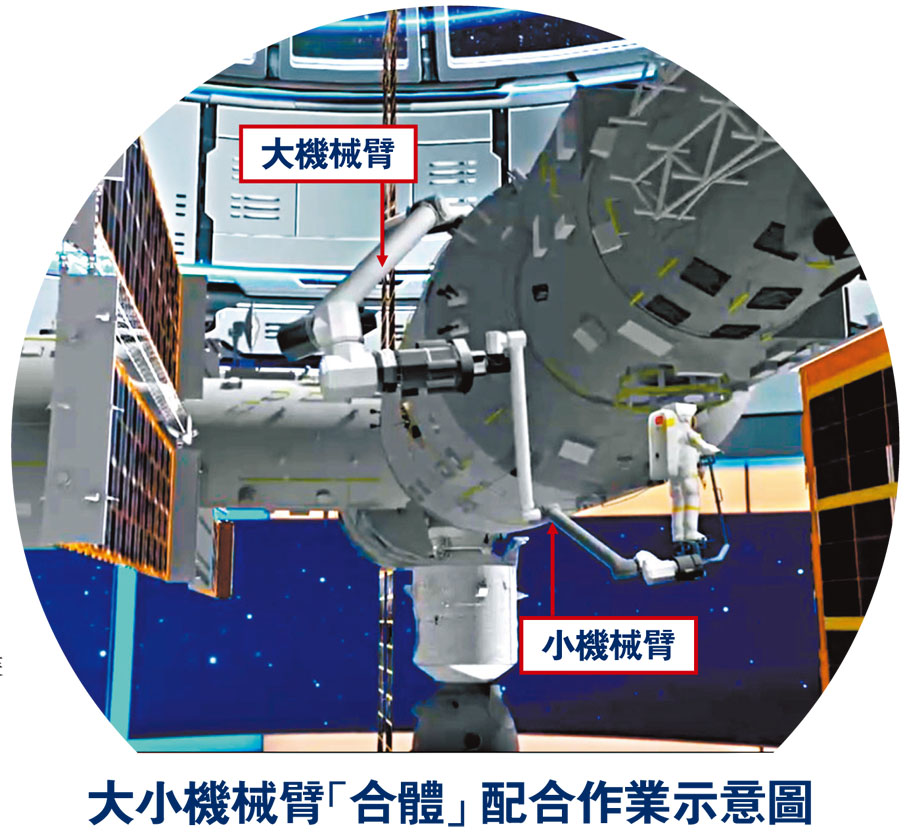
值得一提的是,在本次任務中,太空站大、小機械臂首次聯手,形成組合機械臂,全力支撐出艙任務順利實施:機械臂按照地面規劃,精準運動到指定位置,配合航天員完成操作任務,在整個任務中,機械臂運動精度符合要求,與航天員配合堪稱完美。
大小機械臂聯手 工作更靈活自由
據介紹,組合機械臂由大機械臂、小機械臂和大小臂轉接連接件共同組成。其中,大小臂轉接連接件由大機械臂目標適配器和小機械臂目標適配器同原理部件組成,能夠被大機械臂和小機械臂的末端分別捕獲,捕獲之後即形成組合臂。大臂加小臂,使組合機械臂的覆蓋半徑大為擴展,站在天和核心艙的目標適配器上,能夠對本次任務的三艙目標進行操作——這是單臂無法做到的。此外,相較於只有7個自由度的大、小機械臂,組合臂的自由度達到了14個,工作起來更加靈活自由。
不過,長度增加和自由度提高對組合機械臂的安全性和可靠性提出了更高要求。航天科技集團五院總體設計部機械臂產品副總師高升介紹,機械臂變長後,柔性隨之變大,在進行目標操作時的控制難度增大,變長的機械臂也會增加運動規劃的難度,大、小機械臂在運動規劃時要考慮對方的姿態。
為克服上述技術難題,在太空站總體的牽引下,機械臂研製團隊充分論證、反覆試驗,確保了組合機械臂的安全性和可靠性,為艙外載荷照料和航天員出艙等任務提供了更加強大的保障。現在只需要通過組合機械臂,就能輕鬆把小機械臂轉移到夢天實驗艙,轉移之後大、小機械臂分開,小機械臂再爬到相應的目標適配器上完成任務。
神舟十四號乘組的第三次出艙,也是中國太空站的第7次出艙任務。航天科技集團五院空間站系統副總指揮王鑫在接受採訪時表示,後續每個航天員乘組都會有出艙任務,主要是面向後續艙外載荷的安裝和照料,還要出艙進行核心艙上太陽翼的轉移等工作。據介紹,中國太空站正在進行組合體在軌測試。不久之後,神舟十五號乘組將進入太空站,與神舟十四號乘組在太空中完成交接班,隨後,神舟十四號乘組將完成此次長達半年的太空之旅,返回地球。
