「太空之吻」背後的黑科技
交會對接
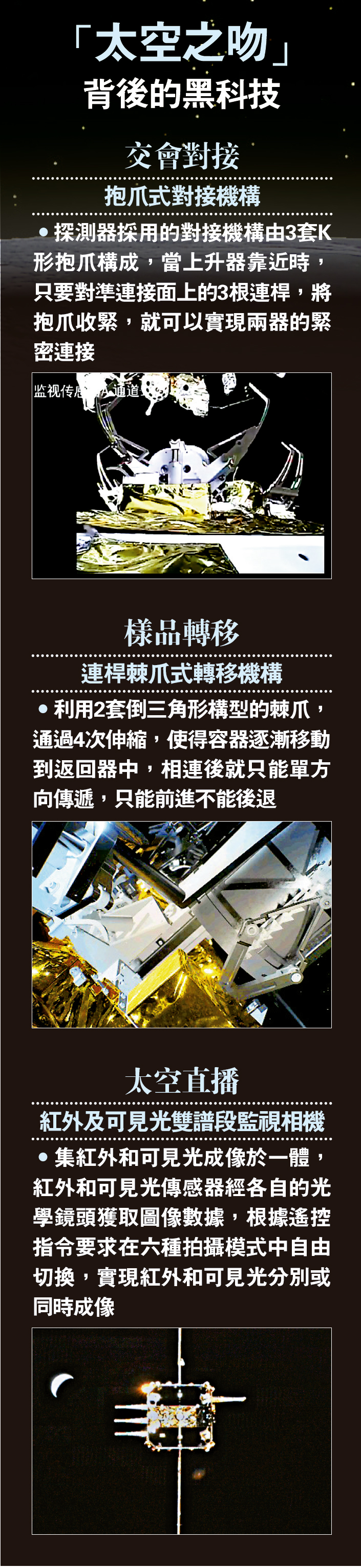
抱爪式對接機構
•探測器採用的對接機構由3套K形抱爪構成,當上升器靠近時,只要對準連接面上的3根連桿,將抱爪收緊,就可以實現兩器的緊密連接
樣品轉移
連桿棘爪式轉移機構
•利用2套倒三角形構型的棘爪,通過4次伸縮,使得容器逐漸移動到返回器中,相連後就只能單方向傳遞,只能前進不能後退
太空直播
紅外及可見光雙譜段監視相機
•集紅外和可見光成像於一體,紅外和可見光傳感器經各自的光學鏡頭獲取圖像數據,根據遙控指令要求在六種拍攝模式中自由切換,實現紅外和可見光分別或同時成像
