科大研仿生太空機械人 擬2029在軌測試
【大公報訊】記者郭如佳報道:香港科技大學宣布正展開在軌仿生機械人研究,項目由科大空間可持續發展人工智能與機器人研究中心主導,項目的驗證計劃獲得了中國科學院相關研究機構的積極響應與支持,計劃於2029年進行在軌操作測試,應對太空碎片及推動在軌製造技術。
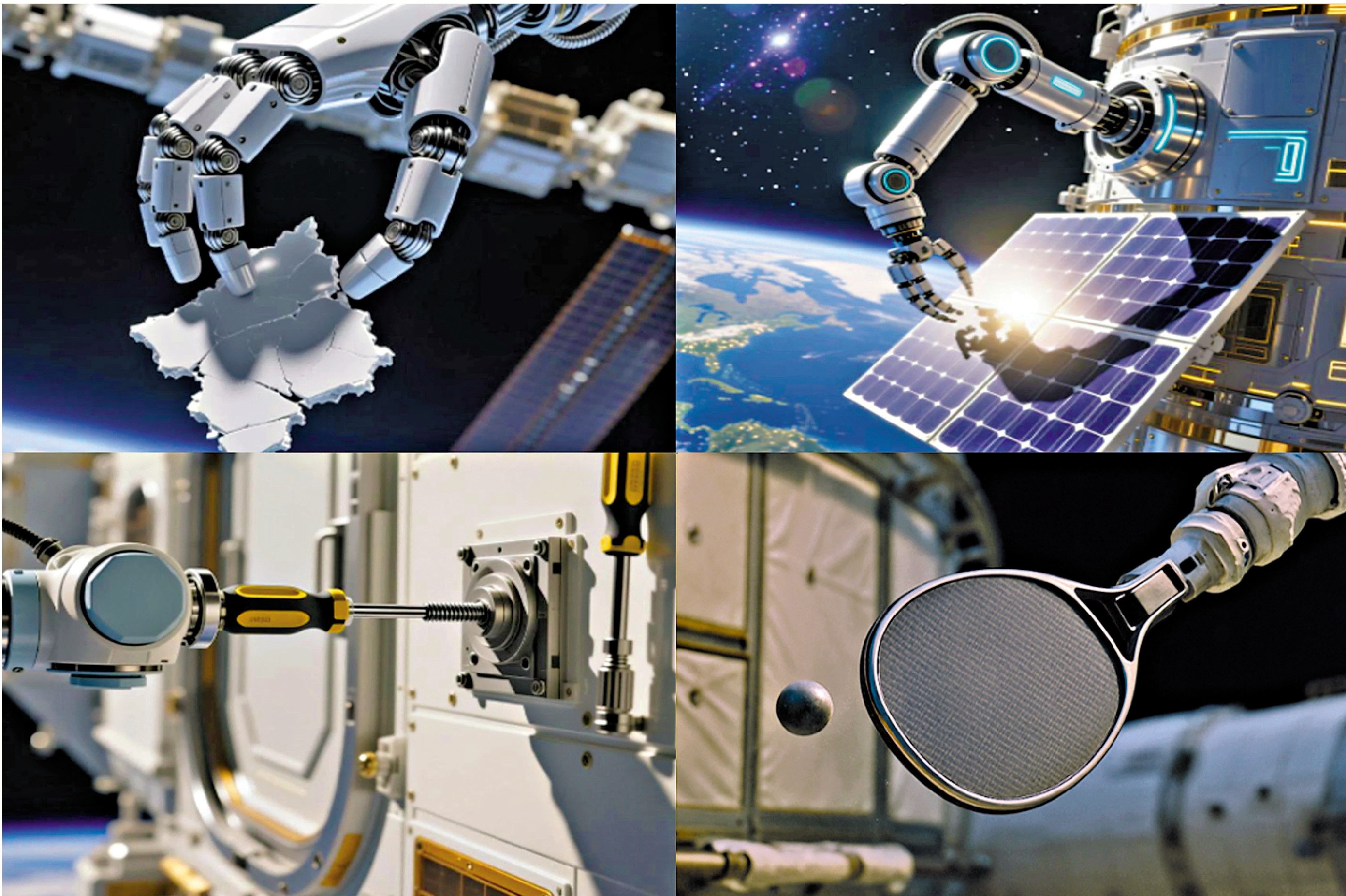
結構參照八爪魚觸手及象鼻
該項目獲星揚五洲控股資助4600萬元,雙方代表日前在科大簽訂了資助協議。項目由國際航天機械人專家、CAIRSS主任兼科大機械及航空航天工程學系教授高揚領導,透過「京、滬、港航天智能創新平台」,聯同中國科學院微小衛星創新研究院及空間應用工程與技術中心合作推進。研究院將利用小型衛星為機械人提供在軌飛行及參與實質任務的機會,以應對日益嚴重的太空碎片問題,並支援太空設施的在軌服務與建設;空間中心則運用其在載人航天任務及無人發射任務方面的技術基礎與設施,為項目提供全方位支援。
有別於以剛性結構為主的傳統太空機械人設計,研究團隊從自然界生物的運動機制與肌肉組織獲得靈感,探索以仿生致動技術研發具高度靈活性與操作性能的新一代太空機械人系統。高揚現任科大牽頭InnoHK香港太空機械人與能源中心主任,並肩負領導國家登月計劃國際合作項目─月面多功能操作機械人暨移動充電站(又名「香港操作機械人」)的重任。
研究以仿生致動機械人技術為核心,模仿如八爪魚觸手及大象鼻子等生物結構,發展較傳統剛性機械人更靈活的系統,以應對太空環境的不確定性,並執行包括捕捉旋轉碎片及組裝大型結構等高精度任務。團隊指新系統可提升在軌服務與建設能力,為在軌機械人奠定關鍵的科學與工程基礎。
科大近年積極深耕航天科技,繼2023年發射香港高等教育界首枚衛星後,2024年再獲國家航天局委任牽頭國家登月計劃多功能操作機械人國際合作項目。是次仿生機械人研究被視為延伸相關技術發展,並探索在軌維修、設備運維及數據應用等場景。
