無人機新突破❸/無人機變身潛艇 海上搜救生力軍
無人機不僅能在空中飛行,亦能在水面滑行,更能潛入海底。香港中文大學(中大)USR研究組負責人陳本美教授,帶領其團隊在近年來產出了一系列功能多樣、各具特色的無人機,包括2023年推出的、具有「上天入海」能力的「同濟飛魚」,以及今年完成的「中大鯨靈」無人機項目。
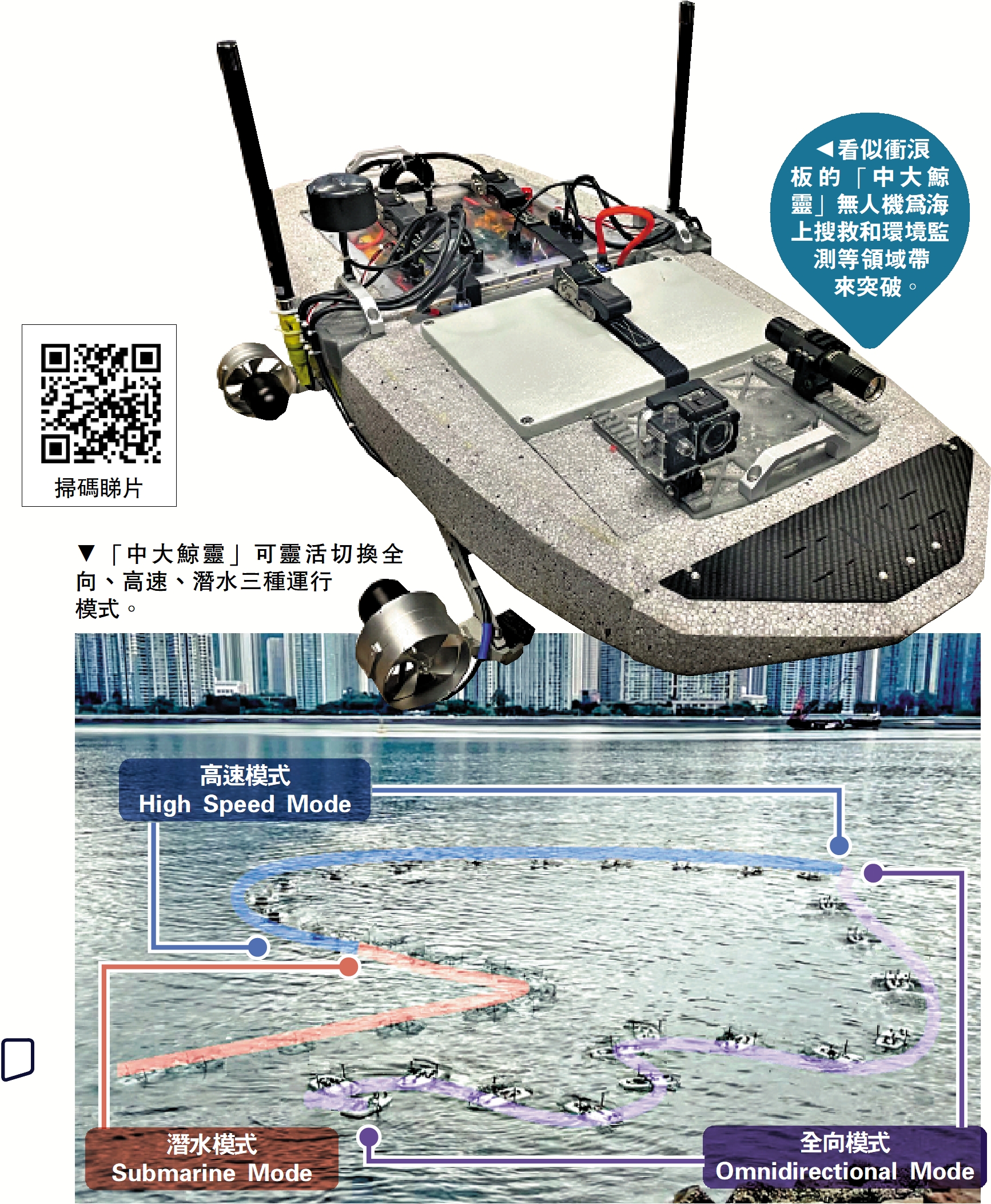
陳本美及其團隊就「中大鯨靈」項目,近日接受《大公報》獨家專訪,率先披露該系統功能:它就像是海洋中的「變形金剛」,可靈活切換全向、高速、潛水三種運行模式,破解傳統海洋無人設備功能單一的困境,為海上搜救和環境監測等領域帶來突破。\大公報記者 邱梓茵、湯嘉平
大公報記者走進中大USR研究組實驗室,見到堆積有序的無人機部件間,一塊形似灰色衝浪板的設備格外引人注目。「這看似普通的衝浪板,其實是我們研發的無人機系統『中大鯨靈』,不僅能在『水上漂』,還能鑽入水下變潛水艇。」據陳本美介紹,「中大鯨靈」可根據海洋環境實時調整「運動關鍵部件」,相較於現有海洋無人設備多為「功能固定」,「中大鯨靈」更兼具適應性與機動性。
三模式靈活切換 續航能力強
針對海上搜救等緊急任務,該系統設計了三種專屬運行模式:全向模式配備四個可調節推力推進器,能實現橫向、縱向自由移動及精準轉向,適用於近距離海洋環境監測、搜救目標定位等場景;高速模式通過增強推進力實現高速移動,可快速覆蓋大範圍海域,滿足長距離偵察、大規模搜救需求;潛水模式則依託四個垂直推進器和兩個尾部推進器,即便遭遇輕微水流干擾,也能穩定保持水下姿態與深度,適用於水下探索、水下環境監測等作業。
這些創新功能的實現,離不開核心技術的支撐。該機器的主要設計者丁文鏑介紹,「中大鯨靈」搭載了自主研發的「非正交傾斜重構機制」,其推進器可圍繞特殊軸進行旋轉,推力方向能覆蓋多個方向,不同於傳統設備僅能在單一平面調整。這一設計讓推進器可靈活切換至三種模式所需的推力方向,且切換過程連續穩定,確保設備在運動中隨時「變身」。
此外,「中大鯨靈」配備了先進的控制系統作為「大腦」:48V大容量電池提供充足動力,支持高速移動與長時間作業;專業飛行管理單元與英特爾NUC電腦構成控制核心,可實時處理傳感器數據並調整設備姿態;GPS定位、壓力傳感器、防水攝像頭及探照燈等設備,則確保其在複雜海洋環境中精準執行各項任務。
丁文鏑透露,目前「中大鯨靈」的相關商業化資料尚在積累中,「後續我們將重點針對海洋搜救領域開展進一步開發,推動項目落地應用。」
